-

-
Maths
Rotation dans le plan
1ère année bac Sciences Expérimentales Maths Rotation dans le plan fiche de cours
Les deux photos montrent une balançoire pour enfant et la Grande Roue. Ces deux systèmes sont constitués par des corps solides qui ont un mouvement de rotation autour d’un axe fixe. Qu’est-ce qu’un mouvement de rotation ? Et quelles sont ses caractéristiques ?

Dans ce cours, on découvrira en particulier les mouvements de rotation dans le plan.
Rotation simple et réciproque
تعريف
Soit $\Omega$ un point du plan orienté positivement et $\theta$ un réel.La rotation $r$ de centre $\Omega$ et d'angle $\theta$ est la transformation du plan notée $r(\Omega ; \theta)$ ou $r_{(\Omega ; \theta)}$ qui vérifie : $\quad r(\Omega)=\Omega$
Et pour tout point $M$ du plan différent de $\Omega$ ; La rotation $r$ transforme un point $M$ en un point image $M^{\prime}$ tel que :
$rM=M^{\prime} \Leftrightarrow \left\{\begin{array}{c}\Omega M^{\prime}=\Omega M \\\left(\overrightarrow{\Omega M}, \overrightarrow{\Omega M^{\prime}}\right)\equiv \theta~[2 \pi]\end{array}\right.$
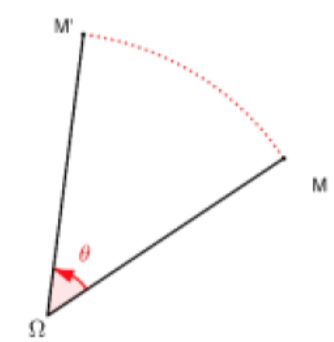
D'après la figure ci-dessus $r_{(\Omega ; \theta)}(M)=M^{\prime}$
Remarque
1. L'image du centre $\Omega$ est $\Omega$ (on dit que le point $\Omega$ est invariant),
2. Les rotations d'angle $\theta=\frac{\pi}{2}$ sont appelées quarts de tour direct,
3. Les rotations d'angle $\theta=-\frac{\pi}{2}$ sont appelées quarts de tour indirect,
4. La rotation de centre $\Omega$ et d'angle $\theta=\pi$ est la symétrie centrale par rapport à $\Omega$.5. Si l'angle de la rotation est non nul, son centre est le seul point invariant.
مثال
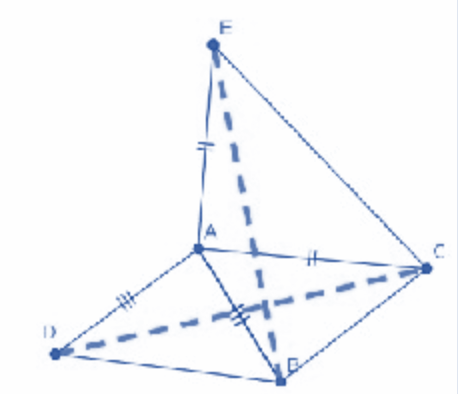
$\mathrm{ABC}$ est un triangle. On construit à l'extérieur deux triangles $ABD$ et $ACE$ isocèles et rectangles en $A$
1. Montrer que : $\mathrm{BE}=\mathrm{CD}$
2. Montrer que : $(\mathrm{BE}) \perp(\mathrm{CD})$
Solution :
1- Soit $r$ la rotation de centre $A$ et d'angle $\frac{\pi}{2}$ On a : $\left\{\begin{array}{l}\frac{\mathrm{AD}=\mathrm{AB} }{ \overrightarrow{\mathrm{AD}} ; \overrightarrow{\mathrm{AB}})}\equiv\frac{\pi}{2}[2\pi]\end{array}\right.$ donc: $r(\mathrm{D})=\mathrm{B}$
On a: $\left\{\begin{array}{l}\frac{A C=A E}{(\overrightarrow{\mathrm{AC}} ; \overrightarrow{\mathrm{AE}})} \equiv \frac{\pi}{2}[2 \pi]\end{array}\right.$
donc: $r(C)=E~$ Et puisque la rotation conserve les distances. Alors, on déduit que $B E=C D$
2- on a $~r(D)=B~$ et $~r(C)=E~$
Donc: $\overline{(\overrightarrow{C D}, \overrightarrow{E B})} \equiv \frac{\pi}{2}[2 \pi]$
par suite : $~(B E) \perp(C D)$


Rotation réciproque
تعريف
Soit $r$ une rotation de centre $\Omega$ et d'angle $\alpha$. La rotation de centre $\Omega$ et d'angle $-\alpha$ est appelée rotation réciproque de $r$. On la note $r^{-1}$.
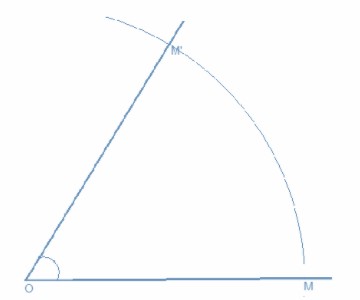
D'après la figure ci-dessus on a: $~r_{o}^{-1}\left(M^{\prime}\right)=M$.
Remarque
Soient $M$ et $N$ deux points du plan, si $r_{o}(M)=M^{\prime} ;$ Alors
$r_{o}^{-1}\left(M^{\prime}\right)=M$

Caractéristiques et propriétés de la rotation
Pour continuer cette fiche de cours, Inscris-toi gratuitement sur Kezakoo

- Fiches de cours illimitées
- Une vidéo gratuite par leçon
- 2 exercices gratuits par leçon
- Un test gratuit par leçon